




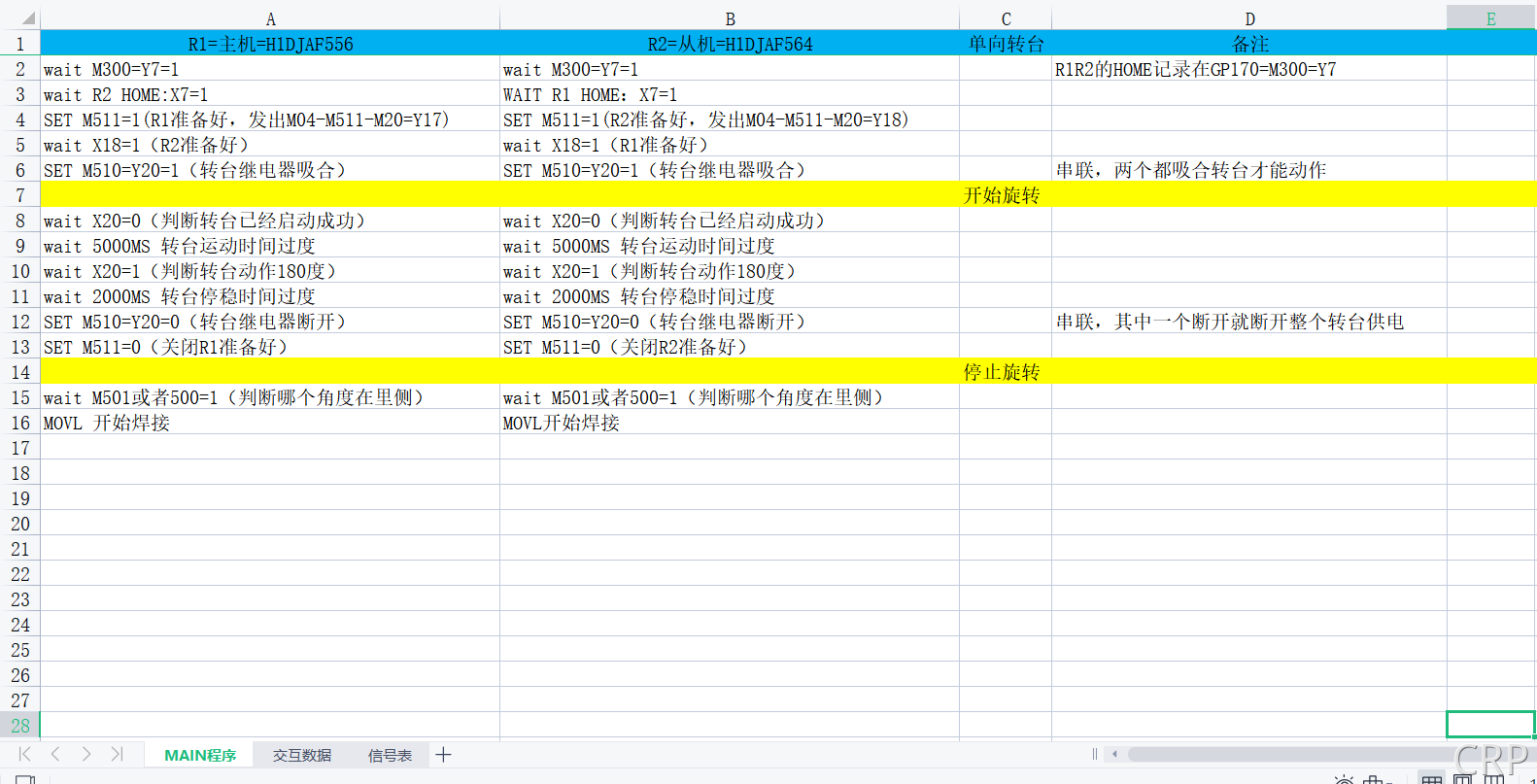
R1主機(jī)-H1DJAF556
單向轉(zhuǎn)臺(tái)
R2從機(jī)機(jī)H1DJAF564
備注
R1R2的HOME記錄在GP170M300-Y7
WAIT M300Y71
WAITM300Y71
WAIT R2 HOME:X7-1
WAIT R1 HOME: X7-1
SET M511-1(R1準(zhǔn)備好,發(fā)出M04-M511-M20-Y17)
SET M511-1(R2準(zhǔn)備好,發(fā)出MO4-M511-M20-Y18)
WAITX181(R2準(zhǔn)備好)
WAIT X18-1(R1準(zhǔn)備好)
串聯(lián),兩個(gè)都吸合轉(zhuǎn)臺(tái)才能動(dòng)作
SET M510Y201(轉(zhuǎn)臺(tái)繼電器吸合)
SET M510Y201(轉(zhuǎn)臺(tái)繼電器吸合)
開(kāi)始旋轉(zhuǎn)
WAIT X20-0(判斷轉(zhuǎn)臺(tái)已經(jīng)啟動(dòng)成功)
WAITX20-0(判斷轉(zhuǎn)臺(tái)已經(jīng)啟動(dòng)成功)
WAIT 5000MS轉(zhuǎn)臺(tái)運(yùn)動(dòng)時(shí)間過(guò)度
WAIT5000MS轉(zhuǎn)臺(tái)運(yùn)動(dòng)時(shí)間過(guò)度
10WAITX201(判斷轉(zhuǎn)臺(tái)動(dòng)作180度)
WAIT X20-1(判斷轉(zhuǎn)臺(tái)動(dòng)作180度)
11 WA
WAIT2000MS轉(zhuǎn)臺(tái)停穩(wěn)時(shí)間過(guò)度
WAIT2000MS 轉(zhuǎn)臺(tái)停穩(wěn)時(shí)間過(guò)度
串聯(lián),其中一個(gè)斷開(kāi)就斷開(kāi)整個(gè)轉(zhuǎn)臺(tái)供電
12 S
SET M510Y20(轉(zhuǎn)臺(tái)繼電器斷開(kāi))
SETM510Y20-0(轉(zhuǎn)臺(tái)繼電器斷開(kāi))
SET M511-0(關(guān)閉R1準(zhǔn)備好)
SETM5110(關(guān)閉R2準(zhǔn)備好)
停止旋轉(zhuǎn)
WAIT M501或者5001(判斷哪個(gè)角度在里側(cè))
WAIT M501或者500-1(判斷哪個(gè)角度在里側(cè))
MOVL開(kāi)始焊接
MOVL開(kāi)始焊接
大人
交互數(shù)據(jù)
信號(hào)表
MAIN程序
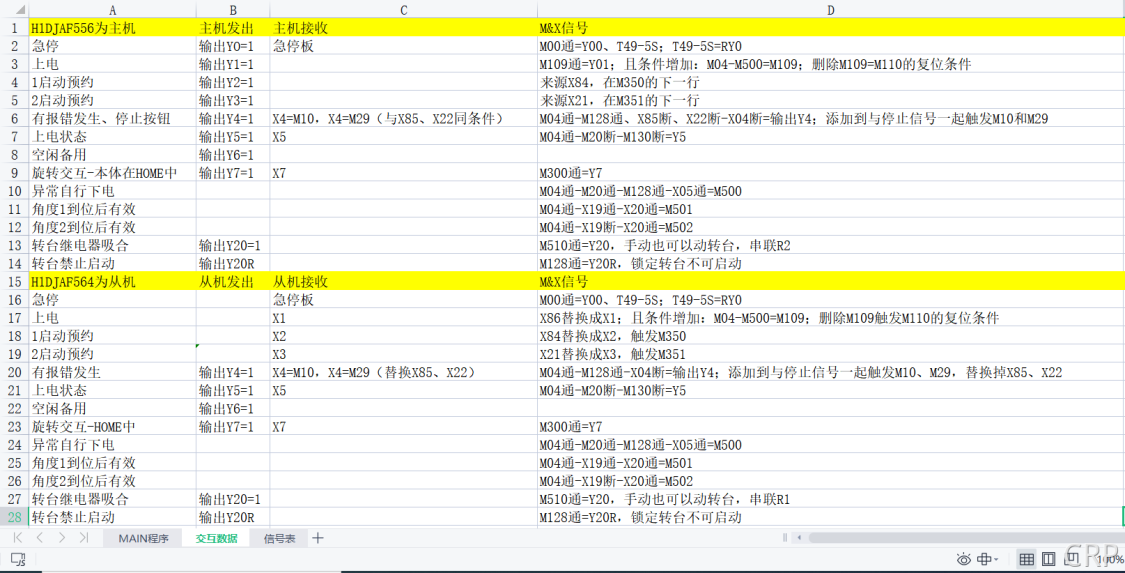
主機(jī)發(fā)出
主機(jī)接收
H1DJAF556為主機(jī)
M&X信號(hào)
急停板
急停
M00通Y00,T49-5S:T49-5S-RYO
輸出YO-1
M109通-Y01:且條件增加:M04-M500-M109:刪除M109-M110的復(fù)位條件
上電
輸出Y11
1啟動(dòng)預(yù)約
來(lái)源X84,在M350的下一行
輸出Y2-1
來(lái)源X21,在M351的下一行
2啟動(dòng)預(yù)約
輸出Y31
M04通-W128通,X85斷,X22新-X04斷一輸出74:添加到與停止信號(hào)一起觸發(fā)M10和M29
有報(bào)錯(cuò)發(fā)生,停止按鈕
X4-M10,X4-M29(與X85,X22同條件)
輸出Y41
上電狀態(tài)
輸出Y5-1
M04通-M20斷-M130斷Y5
X5
空閑備用
輸出Y6-1
X7
輸出Y7-1
M300通Y7
旋轉(zhuǎn)交互-本體在HOME中
M04通-M20通-M128通-X05通-M500
異常自行下電
10月
11角
角度1到位后有效
M04通-X19通-X20通M501
12角度2到位后有效
M04通-X19斷-X20通M502
M510通-Y20,手動(dòng)也可以動(dòng)轉(zhuǎn)臺(tái),串聯(lián)R2
13轉(zhuǎn)臺(tái)繼電器吸合
輸出Y201
14轉(zhuǎn)臺(tái)禁止啟動(dòng)
輸出Y20R
M128通Y20R,鎖定轉(zhuǎn)臺(tái)不可啟動(dòng)
15H1DJAF564為從機(jī)
從機(jī)接收
M&X信號(hào)
從機(jī)發(fā)出
急停板
M00通Y00,T49-5S:T49-5SRY0
16急停
17上電
X86替換成X1;且條件增加:M04-M500-M109:刪除M109觸發(fā)M110的復(fù)位條件
X1
181啟動(dòng)預(yù)約
X2
X84替換成X2,觸發(fā)M350
X21替換成X3,觸發(fā)M351
192啟動(dòng)預(yù)約
X3
M04通-1128通-X04斷二輸出Y4:添加到與停止信號(hào)一起觸發(fā)M10,M29,替換掉X85,X22
輸出Y4-1
X4M10,X4M29(替換X85,X22)
20有報(bào)錯(cuò)發(fā)生
上電狀態(tài)
輸出Y5-1
M04通-M20斷-M130斷Y5
X5
22 空閑備用
輸出Y6-1
輸出Y7-1
X7
M300通Y7
23
旋轉(zhuǎn)交互-HOME中
24
M04通-M20通-M128通-X05通-M500
異常自行下電
25角度1到位后有效
M04通-X19通-X20通M501
26角度2到位后有效
M04通-X19斷-X20通M502
27轉(zhuǎn)臺(tái)繼電器吸合
M510通Y20,手動(dòng)也可以動(dòng)轉(zhuǎn)臺(tái),串聯(lián)R1
輸出Y201
28
轉(zhuǎn)臺(tái)禁止啟動(dòng)
M128通Y20R,鎖定轉(zhuǎn)臺(tái)不可啟動(dòng)
輸出Y20R
十
信號(hào)表
交互數(shù)據(jù)
MAIN程序
100%
D
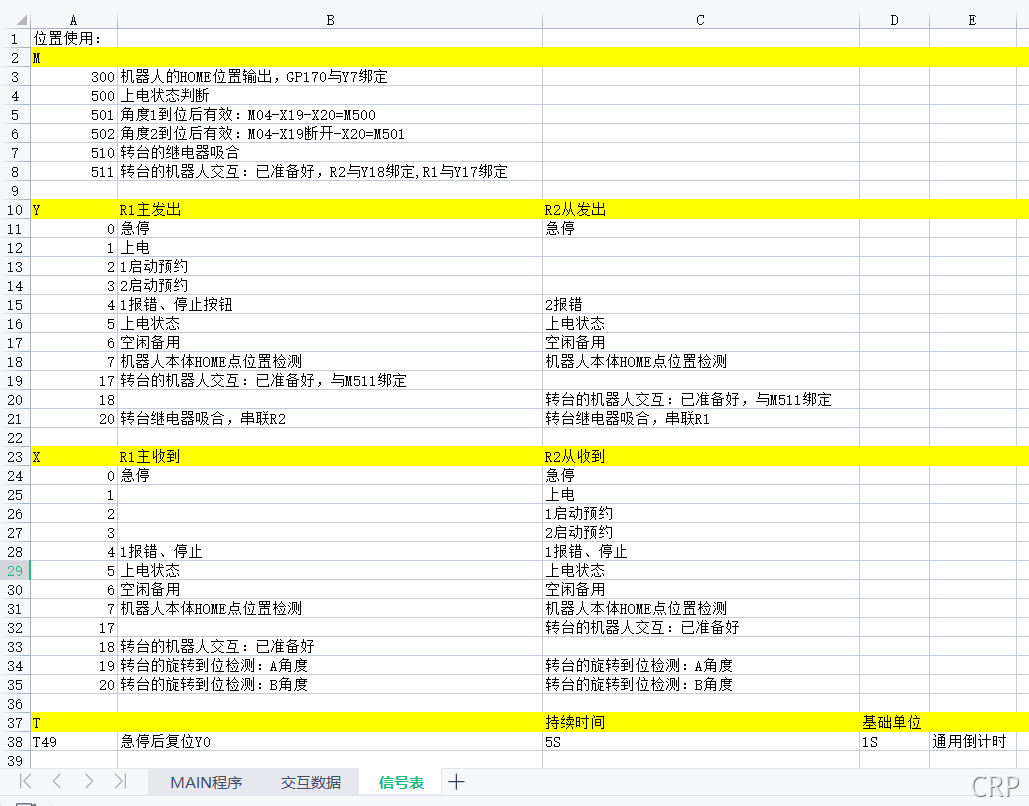
位置使用:
300機(jī)器人的HOME位置輸出,GP170與Y7綁定
500 上電狀態(tài)判斷
501 角度1到位后有效:M04-X19-X20-M500
502角度2到位后有效:M04-X19斷升-X20M501
6
510轉(zhuǎn)臺(tái)的繼電器吸合
511轉(zhuǎn)臺(tái)的機(jī)器人交互:已準(zhǔn)備好,R2與Y18綁定,R1與Y17綁定
R1主發(fā)出
R2從發(fā)出
10
急停
0急停
11
1 上電
12
21啟動(dòng)預(yù)約
13
2啟動(dòng)預(yù)約
14
2報(bào)錯(cuò)
:1報(bào)錯(cuò),停止按鈕
15
上電狀態(tài)
5 上電狀態(tài)
16
空閑備用
6空閑備用
17
機(jī)器人本體HOME點(diǎn)位置檢測(cè)
7機(jī)器人本體HOME點(diǎn)位置檢測(cè)
18
17轉(zhuǎn)臺(tái)的機(jī)器人交互:已準(zhǔn)備好,與M511綁定
19
轉(zhuǎn)臺(tái)的機(jī)器人交互:已準(zhǔn)備好,與M511綁定
18
20
轉(zhuǎn)臺(tái)繼電器吸合,串聯(lián)R1
20轉(zhuǎn)臺(tái)繼電器吸合,串聯(lián)R2
21
22
R2從收到
R1主收到
23
急停
急停
24
上電
25
1啟動(dòng)預(yù)約
2
26
2啟動(dòng)預(yù)約
3
27
41報(bào)錯(cuò),停止
1報(bào)錯(cuò),停止
28
5
上電狀態(tài)
上電狀態(tài)
29
空閑備用
6空閑備用
30
7機(jī)器人本體HOME點(diǎn)位置檢測(cè)
機(jī)器人本體HOME點(diǎn)位置檢測(cè)
31
轉(zhuǎn)臺(tái)的機(jī)器人交互:已準(zhǔn)備好
17
32
18轉(zhuǎn)臺(tái)的機(jī)器人交互:已準(zhǔn)備好
33
轉(zhuǎn)臺(tái)的旋轉(zhuǎn)到位檢測(cè):A角度
19轉(zhuǎn)臺(tái)的旋轉(zhuǎn)到位檢測(cè):A角度
34
轉(zhuǎn)臺(tái)的旋轉(zhuǎn)到位檢測(cè):B角度
20轉(zhuǎn)臺(tái)的旋轉(zhuǎn)到位檢測(cè):B角度
35
36
持續(xù)時(shí)間
基礎(chǔ)單位
37
通用倒計(jì)時(shí)
急停后復(fù)位YO
5S
38 T49
1S
39
+
交互數(shù)據(jù)
信號(hào)表
MAIN程序
0:00/2:25
無(wú)限旋轉(zhuǎn)臺(tái)電氣思路.xls(244 KB)
PLC和Main程序.rar(5 KB)
三輪車(chē)拔管.mp4(42.5 MB)





